Освоение космоса
Drang nach Kosmos
Автор: Андрей Тобольский
Воплощая в жизнь заветы президента США Джорджа Буша, специалисты NASA и ведущих аэрокосмических концернов уже разработали громкие проекты исследования и освоения Солнечной системы.
В отпуск на Марс
Новый принцип движения в космическом пространстве, в Университете штата Вашингтон в США, способен радикальным образом сократить время путешествия до Марса и обратно. При учете, что расчетное время такой миссии составляет всего около 90 дней на путь туда и обратно, это может стать первым по-настоящему серьезным шагом в освоении человечеством ближнего внеземелья.
По утверждению профессора , возглавляющего команду разработчиков, с помощью магнитно-лучевого плазменного двигателя быстрые перелеты по Солнечной системе могут стать обыденными.
В настоящее время при использовании имеющихся ракетных технологий и тщательном подборе взаимного расположения Земли и Марса пилотируемая экспедиция к Красной планете, проведение в точке назначения исследовательских работ и возвращение обратно займут приблизительно два с половиной года.
"Мы работаем над тем, чтобы астронавты могли обернуться за три месяца, - говорит Уингли, - и придерживаемся того мнения, что миссия, затянувшаяся на два с половиной года, имеет довольно мало шансов на успех".
Концепция магнитно-лучевого двигателя стала одной из двенадцати разработок, высоко оцененных Институтом передовых разработок NASA и получивших на дальнейшее развитие в ближайшие полгода 75 тысяч долларов от руководителей аэрокосмического агентства США. За предстоящие шесть месяцев каждое из предложений будет досконально изучено, эксперты NASA тщательно взвесят все "за" и "против" каждого проекта и после этого примут окончательное решение, по итогам которого наиболее перспективные разработки получат дальнейшее развитие и существенную финансовую поддержку.

Согласно концепции магнитно-лучевого двигателя, на станции космического базирования будет генерироваться поток магнитных частиц, направленный в магнитный парус корабля, получающего, таким образом, возможность быстро передвигаться по Солнечной системе. По расчетам Уингли, направляющей сопло диаметром в 32 метра должно образовывать поток плазмы, способный разогнать космический корабль до скорости 11,7 километра в секунду. Это позволит аппарату за день покрыть расстояние в миллион с небольшим километров.
Среднее расстояние от Земли до Марса составляет порядка 77 миллионов километров, хотя эта дистанция может варьироваться в зависимости от взаимного расположения обеих планет. Пролетая в сутки примерно один миллион километров, корабль с магнитно-лучевым плазменным двигателем преодолеет среднее расстояние до Марса за 76-77 дней. Однако Уингли сейчас прорабатывает способы достичь даже больших скоростей, чтобы все путешествие до Марса и обратно можно было совершить всего за три месяца.
Для того чтобы использовать на практике столь высокую скорость, на другом конце маршрута потребуется установить на космической платформе еще один плазменный ускоритель, который обеспечит торможение корабля при подлете к Марсу. Такой подход, по мнению Уингли, избавит от необходимости прицеплять огромные ускорители к кораблю.
Американский профессор уже в мыслях оснастил все возможные пункты назначения экспедиций NASA платформами ускорителей. Если одну такую батарею отправить с исследовательской экспедицией к лунам Юпитера, то автоматический аппарат оставит на орбите газового гиганта ускорительный блок для будущих миссий в систему Юпитера. Подобные разгонные блоки в отдаленных уголках Солнечной системы оснастят ядерными реакторами для выработки ионизированной плазмы, а те, что будут располагаться ближе к Солнцу, смогут подзаряжаться от солнечных батарей.
Концепция магнитно-лучевого ускорения выросла из предшествующей разработки Уингли - системы, именовавшейся "минимагнитосферический плазменный двигатель". В той версии космический корабль окружался "пузырем" плазмы, позволявшим использовать для движения солнечный ветер. Проект магнитно-лучевого ускорителя делает аппарат независимым от излучения Солнца, заменяя его полностью подконтрольным человеку (как по мощности, так и по направлению) плазменным излучателем.
При достаточном финансировании пробный запуск магнитно-лучевого космического корабля можно осуществить уже через пять лет, утверждает Уингли. Профессор признает, что первоначальные вложения в его проект исчисляются миллиардами долларов, которые придется потратить на размещение базовых ускорителей по всей Солнечной системе. Однако после того как платформы будут установлены, ресурс этих батарей окажется практически ничем не ограничен. Система распределенных станций чрезвычайно сократит затраты на космические полеты внутри системы, так как любому кораблю больше уже не понадобятся собственные ускорители. Аппараты будут быстро набирать скорость при помощи плазменных излучателей, перелетать к цели назначения и там тормозить благодаря другой базовой станции.
"Таким образом можно положить начало настоящему освоению Солнечной системы человечеством. Именно к этому мы и стремимся", - подчеркивает Уингли.
Морской владыка на прицеле
После впечатляющего броска "Кассини" к Сатурну и планирующейся не позднее 2012 года экспедиции JIMO в систему лун Юпитера американские ученые и инженеры уже строят планы дальнейшего развития космической программы.
Через тридцать лет, как ожидается, к Нептуну и его спутникам отправится аппарат с ядерным двигателем. Целью этой миссии станет подробное исследование самого дальнего газового гиганта Солнечной системы. Ученые надеются, что таким образом удастся лучше понять процесс формирования планет Солнечной системы и основные принципы образования звездных систем вообще.
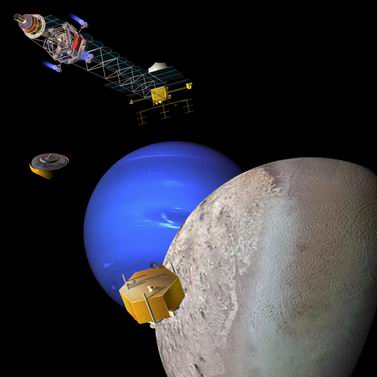
Финансируемый NASA проект, который создают специалисты , рассчитан на тщательную проработку в течение года. Эту одну из пятнадцати "Миссий будущего", планирующуюся в рамках развития американской долгосрочной программы исследования космоса, радиоинженер из Политехнического института Джорджии называет "самой дальней космической одиссеей".
О Юпитере и Сатурне, как уже говорилось выше, к 2012 году исследователи NASA будут уже знать предостаточно. А вот об их собратьях - "ледяных субгигантах" Уране и Нептуне - известно крайне мало.
"По причине того, что эти две планеты расположены далеко, и Уран, и Нептун обязаны хранить тайны первобытной Солнечной системы - выражаясь языком Карла Сагана, содержать в себе часть "солнечного вещества", звездно-пылевой туманности, из которой сформировались все планеты, - говорит Стеффс. - Нептун в этом отношении - самая "неразбавленная" планета. На нее слабо воздействовало солнечное вещество, ей реже доводилось сталкиваться с кометами и астероидами".
Строение Нептуна также должно сильно отличаться от юпитерианского или сатурнианского по причине более низкой температуры поверхности этого небесного тела. Исследовательский зонд отправится в систему Нептуна, как ожидается, в 2016-2018 годах и прибудет к месту назначения приблизительно в 2035 году.
Роботы в космосе
Неоспоримое преимущество роботов в космических исследованиях заключается в том, что автоматы не нуждаются в еде, питье и способны работать в крайне неблагоприятных условиях. Что еще важнее, потеря автоматического исследователя гораздо предпочтительнее гибели астронавта, хотя разработка и производство киберов - занятие недешевое.
После "золотой эры" беспилотных исследований, когда зонды из СССР и США бороздили космические просторы Солнечной системы и проводили наблюдения на поверхности Луны, Венеры и Марса, мало уже кто сомневался в том, что автоматические исследовательские аппараты ждет большое будущее. Весьма скоро, в конце декабря этого года, посадочный модуль "Гюйгенс" отделится от аппарата "Кассини", чтобы впервые прилуниться на крупнейшем в Солнечной системе планетоиде Титане. Американские марсоходы Spirit и Opportunity уже доказали, что автоматам по силам исследовательские миссии чрезвычайной сложности, но киберпомощников конструируют не только в NASA.
В научно-техническом центре в Нидерландах (ESTEC) ведется активная работа по созданию автоматических помощников астронавтов, призванных заменить дорогостоящие пилотируемые экспедиции рачительными миссиями роботов.
На Земле роботы, как правило, подменяют людей на всевозможной рутинной работе или в условиях возможного риска для здоровья человека: собирают автомобили, разминируют взрывные устройства, варят трубопроводы на морском дне и трудятся в "горячих" зонах атомных электростанций. Однако использовать автоматы в космосе еще выгоднее, считает Джанфранко Висентин, возглавляющий Отдел автоматизации и роботизации ЕКА (ESTEC). Роботы должны помогать людям или вовсе заменять астронавтов при выполнении особо опасных или сложных задач, при выполнении повторяющихся операций, отнимающих много времени работ и даже миссий, которые человек выполнить просто не может. "Киберы выполняют задания быстрее и точнее людей, и вдобавок, работают круглосуточно, не нуждаясь в перерывах на обед и сон", - подчеркивает Висентин.
Что такое косморобот?
В среде инженеров, занимающихся разработкой беспилотных космических аппаратов, едва ли не всякий автоматический зонд называют космороботом, но Висентин предпочитает более точное определение: "мобильная система, способная манипулировать объектами и достаточно универсальная, чтобы выполнять любой набор подобных заданий автономно или под дистанционным контролем".
Главным образом, задача космических роботов заключается в исполнении определенного цикла операций: установить или направить прибор для проведения измерений, собрать образцы для исследования, собрать некую конструкцию или даже обеспечить астронавта средством передвижения.
В некотором смысле космороботы мало отличаются от своих земных собратьев, подменяя человека тогда, когда требуется выполнить какую-либо работу. Тем не менее, к автоматам для работы в безвоздушном пространстве предъявляются некоторые особые требования. Они должны:
* перенести запуск
* функционировать в сложных условиях враждебной среды,
зачастую на большом удалении
* весить как можно меньше, так как каждый
килограмм, выведенный на орбиту, стоит дорого
* потреблять мало энергии и
иметь долгий срок службы
* работать в автоматическом режиме
* обладать
чрезвычайной надежностью
Для соответствия всем этим требованиям требуются передовые и инновационные технологии, а также сложные системы и механизмы. Задача кажется трудновыполнимой, по крайней мере, вовсе не тривиальной, но только так можно конструировать роботы, способные работать за переделами земной атмосферы. При этом единственным преимуществом при работе в космосе является невесомость, позволяющая даже небольшому автомату прилагать минимум усилий для передвижения даже крупных объектов в безвоздушном пространстве.
Типы роботов
Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях - это роверы (луноходы, марсоходы). Такой робот может передвигаться по поверхности другой планеты, неся на борту научные приборы. Как правило, и сам ровер, и научное оборудование на нем функционируют в автоматическом режиме.
Европейское космическое агентство в сотрудничестве с некоторыми промышленными концернами разработало необычайно мелкий микроровер Nanokhod ("Наноход"). Аппарат размером с книжный том весит всего два килограмма, способен нести на борту целый килограмм приборов, исследуя территорию небольшого радиуса вокруг посадочного минимодуля.

Nanokhod создан немецкой компанией von Hoerner & Sulger в сотрудничестве с учеными из Института Макса Планка.
Более крупный робот был спроектирован для сбора образцов грунта других планет. На двенадцатикилограммовом MIRO-2 имеется автоматический бур, который способен извлечь до десяти образцов с разных глубин до двух метров. После выполнения задания этот ровер возвращается на посадочный аппарат, где собранные материалы исследуются при помощи бортовых анализаторов.

MIRO-2 сконструирован компанией Space Systems Finland при участии финского научно-исследовательского центра VTT и Хельсинскского политехнического университета.
Третий минировер, разрабатывающийся в ЕКА - пятнадцатикилограммовый Solero, все энергопотребности которого обеспечиваются солнечной батареей и миниатюрными подзаряжаемыми аккумуляторами. Данный аппарат имеет принципиально новую конструкцию шасси: шесть колес, расположенных по вершинам шестиугольника, обеспечивают ему отличную проходимость.

SOLERO - совместная разработка Швейцарского федерального политехнического института и немецкой фирмы von Hoerner & Sulger.
Уроки природы
Конструкторы роботов черпают вдохновение в творениях природы. Хорошим примером тому служит автомат Aramies/Scorpion, разработкой которого также заведует Европейское космическое агентство. Восемь ног позволяют киберу передвигаться подобно скорпиону по очень пересеченной местности и песчаным дюнам.

Aramies/Scorpion разработан в Бременском университете (Германия)
Еще одним примером воплощения в разработках идей, позаимствованных у природы, является EUROBOT. Автомат величиной с человека предназначен для помощи астронавтам в выполнении разных работ на Международной космической станции. EUROBOT сможет передвигаться по обшивке МКС, удерживаться за поручни подобно астронавту и управляться по телесигналу вышедшими в открытый космос членами экипажа.
Не обошлось без природы и при создании прыгающего робота. При размерах даже меньше сорока сантиметров такой автомат способен перепрыгивать препятствия высотой в два метра. Подобное практически неосуществимо на Земле, с ее силой тяжести, зато вполне возможно на Луне или Марсе.

SHRIMP - это ровер Швейцарского федерального политехнического института (EPFL). Он выбран в качестве шасси для SOLERО.
Висентин особо отмечает, что исследователи ЕКА концентрируют усилия на разработках именно для космоса, от которых почти не будет пользы в земных условиях. "Однако, если такое возможно, мы не против использования наших разработок на нашей планете, просто некоторые функции здесь окажутся невостребованными, - говорит глава ESTEC. - Например, для проведения исследований на Земле едва ли кому-либо пригодится робот-биолог, так как даже с применением самых передовых технологий вряд ли автомат сможет добиться результата, сравнимого с усилиями человека, ученого-биолога. По крайней мере, в наши дни. А вот на Марсе кибер не заменим".
Космос накладывает существенные ограничения на свободу мысли роботехников, и
с этими ограничениями не сталкиваются разработчики земных автоматов. Слабейшего
давления на орбите достаточно, для того чтобы металлические детали сплавились
друг с другом, а атомарный кислород вступает в реакцию практически с любым
материалом и сводит на "нет" всю охладительную пользу от конвекции для
электроники.
Радиация за пределами земной атмосферы тоже
отличается от нам привычной: тяжелые частицы нарушают работу электронных
приборов и даже выводят их строя. Термические условия в космосе экстремальны:
температура среды скачет в диапазоне от -100 до +100 градусов по Цельсию.
EXOMARS станет полевым роботом-биологом на Марсе. Его разработку одновременно ведут две конкурирующие фирмы - EADS Astrium Ltd. и MD Robotics.
То, что роботам приходится выполнять свои миссии на значительном удалении от центра управления, также влечет определенные трудности для разработчиков автоматики. Радиосигналы контроля и мониторинга преодолевают немалые расстояния, что выражается в длительных задержках во время сеансов связи с аппаратами, и это условие исключает возможность телеуправления кибером в реальном времени. Потому космороботы и создаются такими самостоятельными, способными работать без связи с Землей и справляться, по возможности, с любыми возникающими при выполнении миссии проблемами.